、報(bào)警和預(yù)警、遠(yuǎn)程控制和操作
、可視化顯示
、智能分析和優(yōu)化、數(shù)據(jù)共享和管理等功能
,提供了全面
、直觀、智能的吊鉤運(yùn)行監(jiān)控和管理解決方案
。
小車吊鉤可視化的功能可以包括以下幾個(gè)方面:
1. 實(shí)時(shí)顯示吊鉤位置:通過傳感器獲取吊鉤的實(shí)時(shí)位置信息
,并將其在可視化界面上進(jìn)行展示,方便操作人員實(shí)時(shí)監(jiān)控吊鉤的位置
。
2. 吊鉤負(fù)載顯示:通過負(fù)載傳感器獲取吊鉤的負(fù)載信息
,并將其在可視化界面上進(jìn)行展示
,以幫助操作人員了解吊鉤當(dāng)前的負(fù)載情況。
3. 吊鉤運(yùn)動(dòng)軌跡顯示:根據(jù)吊鉤的位置信息
,可視化界面可以顯示吊鉤的運(yùn)動(dòng)軌跡
,方便操作人員了解吊鉤的移動(dòng)路徑。
4. 報(bào)警功能:當(dāng)?shù)蹉^位置或負(fù)載超過設(shè)定的安全范圍時(shí)
,可視化界面可以發(fā)出警報(bào)
,提醒操作人員及時(shí)采取措施,確保吊鉤操作的安全性
。
5. 數(shù)據(jù)記錄和分析:可視化界面可以記錄吊鉤的位置
、負(fù)載等數(shù)據(jù),并進(jìn)行分析和統(tǒng)計(jì)
,以便后續(xù)的數(shù)據(jù)分析和優(yōu)化
。
6. 遠(yuǎn)程控制:通過可視化界面,操作人員可以遠(yuǎn)程控制吊鉤的運(yùn)動(dòng)
,包括上下移動(dòng)
、左右移動(dòng)等操作,提高操作的便捷性和效率
。
7. 多視角顯示:可視化界面可以提供多個(gè)視角的顯示
,包括全景視圖、俯視圖等
,以便操作人員全面了解吊鉤的狀態(tài)和周圍環(huán)境
。
總之,小車吊鉤可視化的功能主要是為了方便操作人員實(shí)時(shí)監(jiān)控吊鉤的位置
、負(fù)載等信息
,提高操作的安全性和效率。

智慧工地塔機(jī)吊鉤可視化的功能主要包括以下幾個(gè)方面:
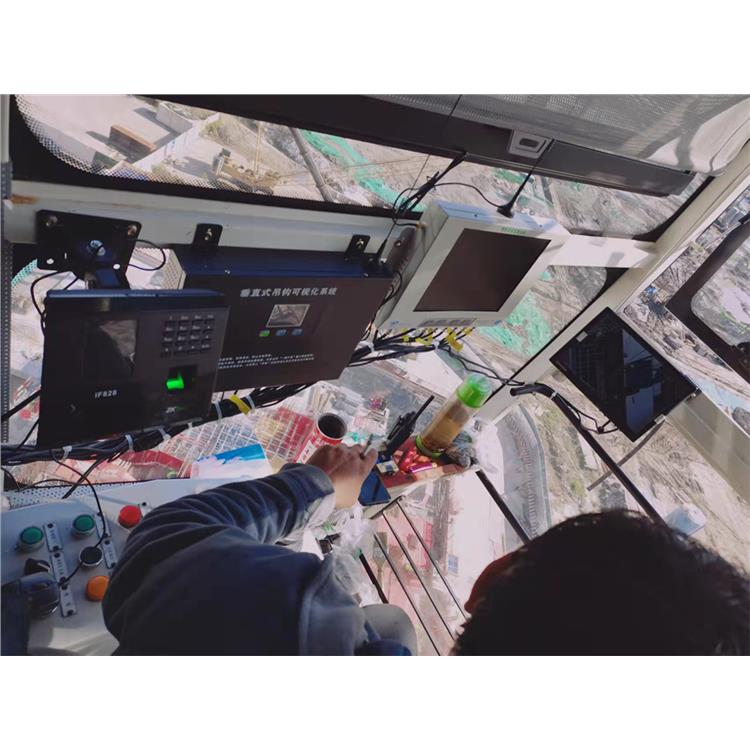
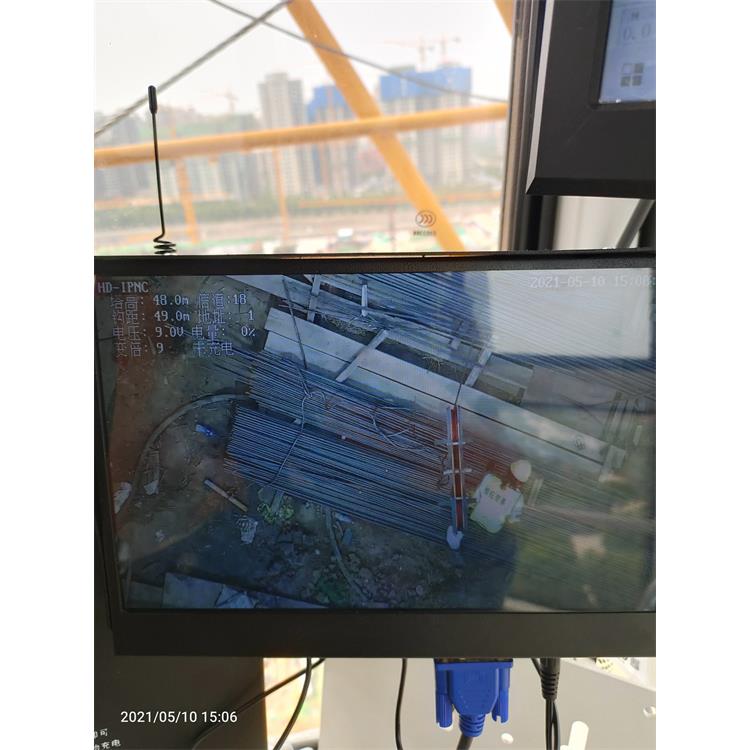
1. 實(shí)時(shí)監(jiān)控:可以實(shí)時(shí)監(jiān)控塔機(jī)吊鉤的運(yùn)行狀態(tài)
,包括吊鉤的位置
、速度、負(fù)荷等參數(shù)
。通過可視化界面
,可以清晰地了解吊鉤的工作情況,及時(shí)發(fā)現(xiàn)異常情況
。
2. 數(shù)據(jù)記錄與分析:可以記錄塔機(jī)吊鉤的工作數(shù)據(jù)
,包括吊鉤的使用時(shí)間、負(fù)荷變化等
。通過數(shù)據(jù)分析
,可以評(píng)估吊鉤的工作效率和安全性,為工地管理提供參考依據(jù)
。
3. 報(bào)警與預(yù)警:通過智能算法
,可以對(duì)塔機(jī)吊鉤的工作狀態(tài)進(jìn)行實(shí)時(shí)監(jiān)測(cè)
,并根據(jù)設(shè)定的閾值進(jìn)行報(bào)警與預(yù)警。例如
,當(dāng)?shù)蹉^超過額定負(fù)荷時(shí)
,系統(tǒng)會(huì)發(fā)出警報(bào),提醒操作人員及時(shí)采取措施
。
4. 遠(yuǎn)程控制:可以通過可視化界面對(duì)塔機(jī)吊鉤進(jìn)行遠(yuǎn)程控制
,包括啟動(dòng)、停止
、升降等操作
。這樣可以減少人工操作的風(fēng)險(xiǎn),提高工作效率
。
5. 數(shù)據(jù)共享與協(xié)同:可以將塔機(jī)吊鉤的工作數(shù)據(jù)與其他工地管理系統(tǒng)進(jìn)行數(shù)據(jù)共享
,實(shí)現(xiàn)信息的互通互聯(lián)。這樣可以提高工地的整體管理水平
,實(shí)現(xiàn)協(xié)同作業(yè)
。
總之,智慧工地塔機(jī)吊鉤可視化的功能可以幫助工地管理人員實(shí)時(shí)監(jiān)控和管理塔機(jī)吊鉤的工作狀態(tài)
,提高工作效率和安全性
。

智慧工地塔機(jī)吊鉤可視化適用于以下場(chǎng)景:
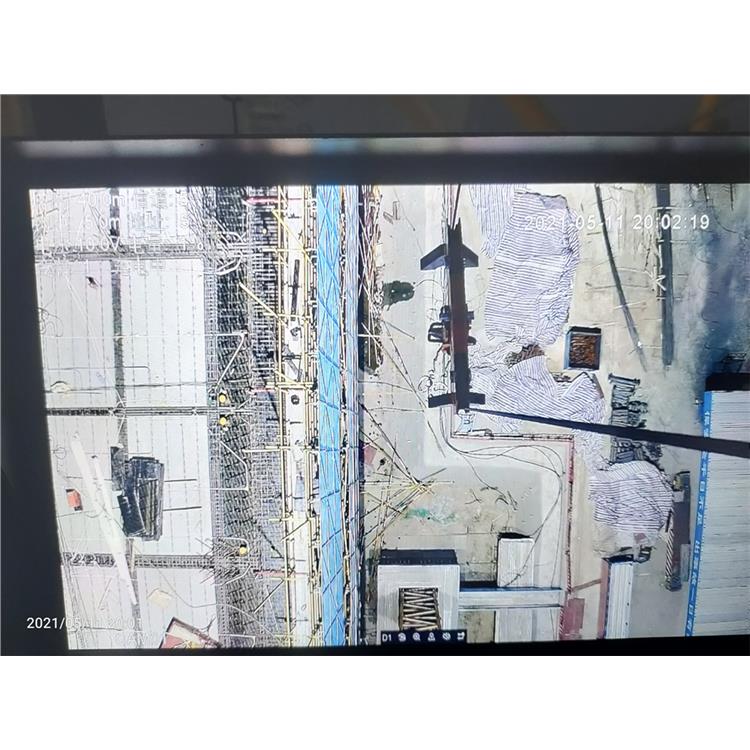
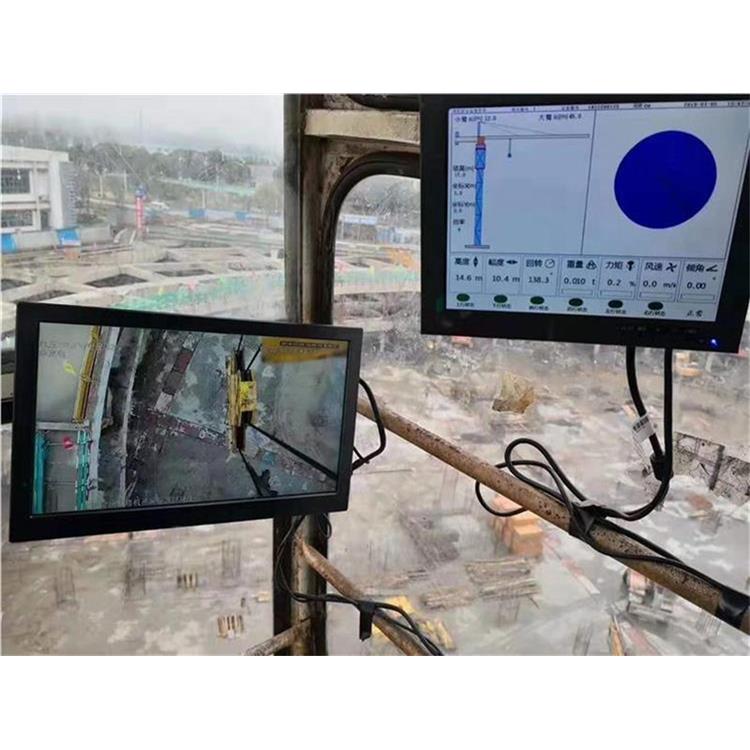
1. 安全監(jiān)控:通過可視化系統(tǒng),可以實(shí)時(shí)監(jiān)控塔機(jī)吊鉤的工作狀態(tài)
,包括吊鉤的位置
、角度、負(fù)荷等信息
,及時(shí)發(fā)現(xiàn)異常情況
,如超載、傾斜等
,以**工地的安全
。
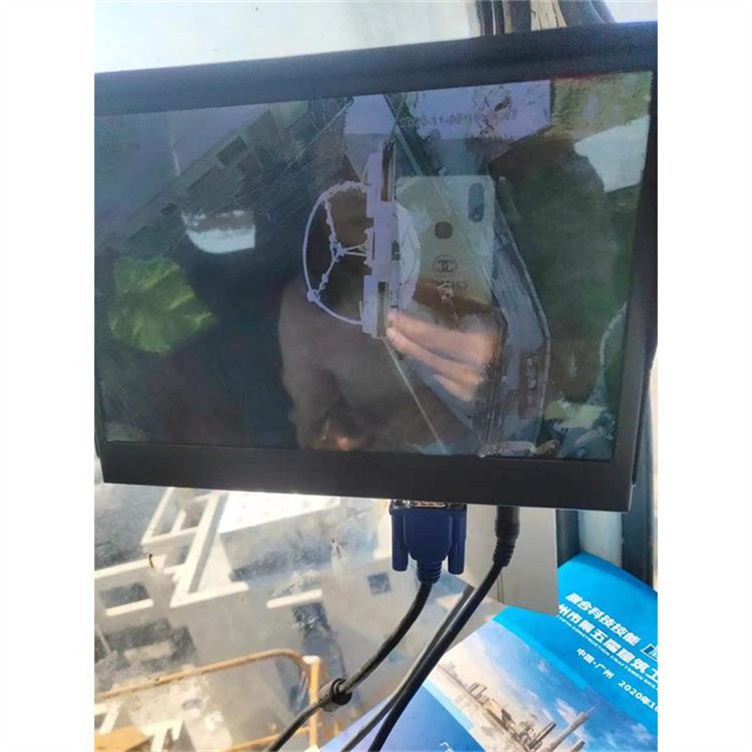
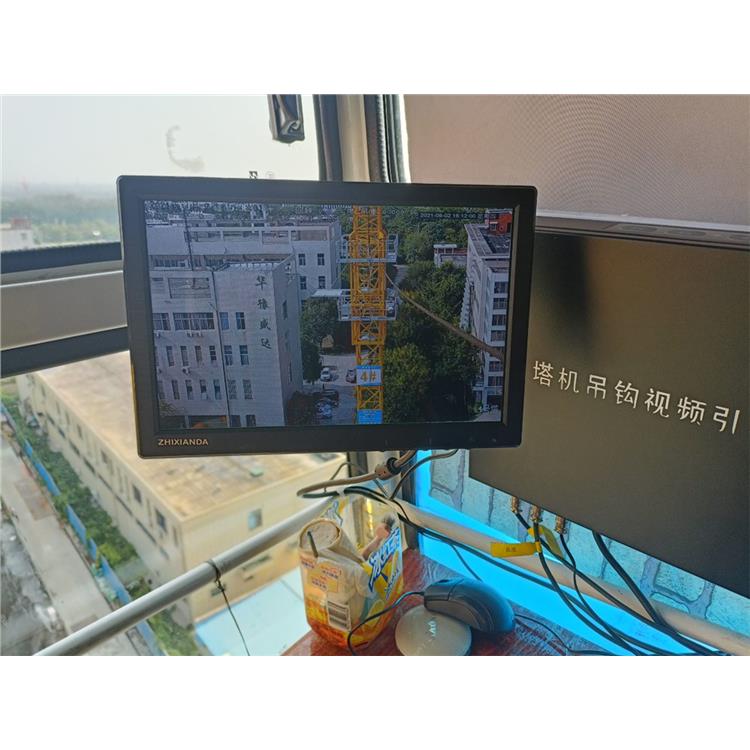
2. 作業(yè)指導(dǎo):可視化系統(tǒng)可以提供吊鉤的實(shí)時(shí)圖像
,操作人員可以通過監(jiān)視器觀察吊鉤的工作情況
,準(zhǔn)確判斷吊鉤與物體的距離和位置,從而指導(dǎo)操作人員進(jìn)行的吊裝作業(yè)
。
3. 數(shù)據(jù)分析:可視化系統(tǒng)可以記錄吊鉤的工作數(shù)據(jù)
,如吊鉤的使用頻率、負(fù)荷變化等
,通過對(duì)這些數(shù)據(jù)的分析
,可以了解吊鉤的工作效率和使用情況,優(yōu)化工地的運(yùn)作流程
,提高工作效率
。
4. 遠(yuǎn)程操作:可視化系統(tǒng)可以實(shí)現(xiàn)對(duì)塔機(jī)吊鉤的遠(yuǎn)程控制
,操作人員可以通過監(jiān)視器對(duì)吊鉤進(jìn)行控制,如調(diào)整吊鉤的位置和角度
,實(shí)現(xiàn)遠(yuǎn)程操作
,提高工作效率和安全性。
5. 培訓(xùn)教育:可視化系統(tǒng)可以用于培訓(xùn)新的操作人員
,通過觀察吊鉤的實(shí)時(shí)圖像和數(shù)據(jù)
,新的操作人員可以地了解吊鉤的工作原理和操作技巧,提高操作的準(zhǔn)確性和安全性